

As Tesla continues to refine its Optimus humanoid robot, two newly published patents offer a detailed look into the mechanical engineering behind the machine. The documents reveal a focus on biomimicry, extreme efficiency, and clever cable routing to solve some of the most notoriously difficult physical challenges in robotics.
By looking closely at the mechanical structures of the hand and the knee, it becomes clearer how Tesla plans to build a robot that is not just capable but also highly durable and energy-efficient.
The Hand: Eradicating Crosstalk
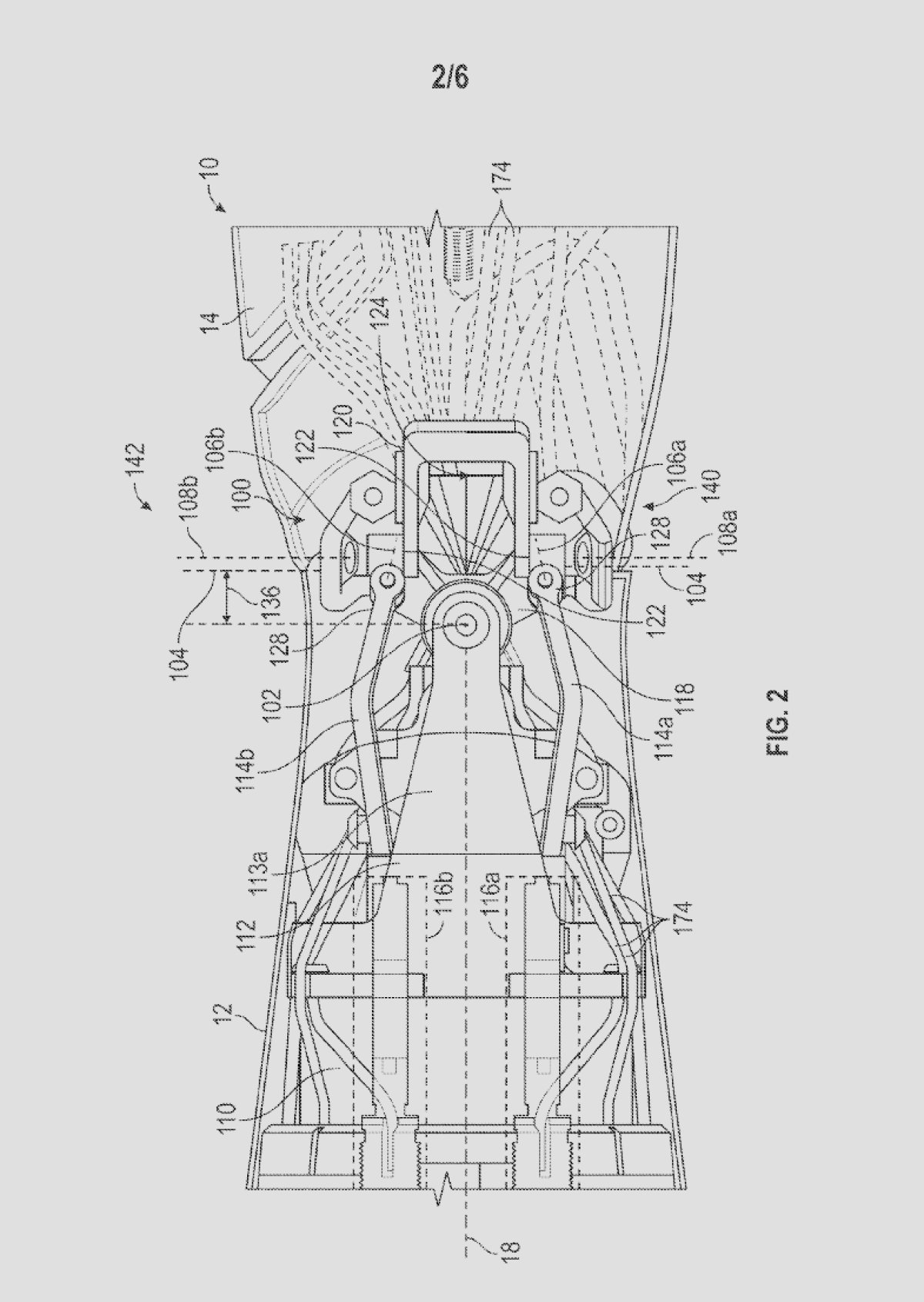
Designing a capable humanoid hand requires running multiple tension cables, which act as artificial tendons, from actuators located in the forearm, through a highly mobile wrist, and down into the individual fingers.
A common and highly frustrating issue in robotics is a phenomenon known as crosstalk. This occurs when bending the wrist unintentionally pulls on those internal cables, causing the fingers to twitch or close without any command from the robot’s brain.
To solve this, Tesla engineers Megan Giacobetti, Rod Jafari, Michael Leddy, Harry Edward Olive, and Shitong Pang detailed a brilliant geometric solution utilizing an orthogonal cable transition exactly at the wrist joint. On the forearm side of the wrist, the control cables are grouped in a lateral, horizontal stack.
Not a Tesla App
This specific arrangement limits the leverage arm across the pitch axis, which controls the up and down movement of the hand. As the cables pass directly through the center of the wrist joint, they mechanically transition into a vertical stack. This secondary configuration limits the leverage arm across the yaw axis, which handles the side-to-side movement.
The primary advantage of this transition is that it perfectly preserves the total cable length during any articulation. By keeping the tension cables positioned directly at the rotational centers of both the pitch and yaw axes, the robot can freely rotate its wrist without unintentionally tightening the finger tendons.
This entirely isolates wrist movement from finger movement, preventing clumsy grasping, eliminating accidental drops, and saving the massive amount of computational power that would otherwise be required to constantly correct unintended finger twitches.
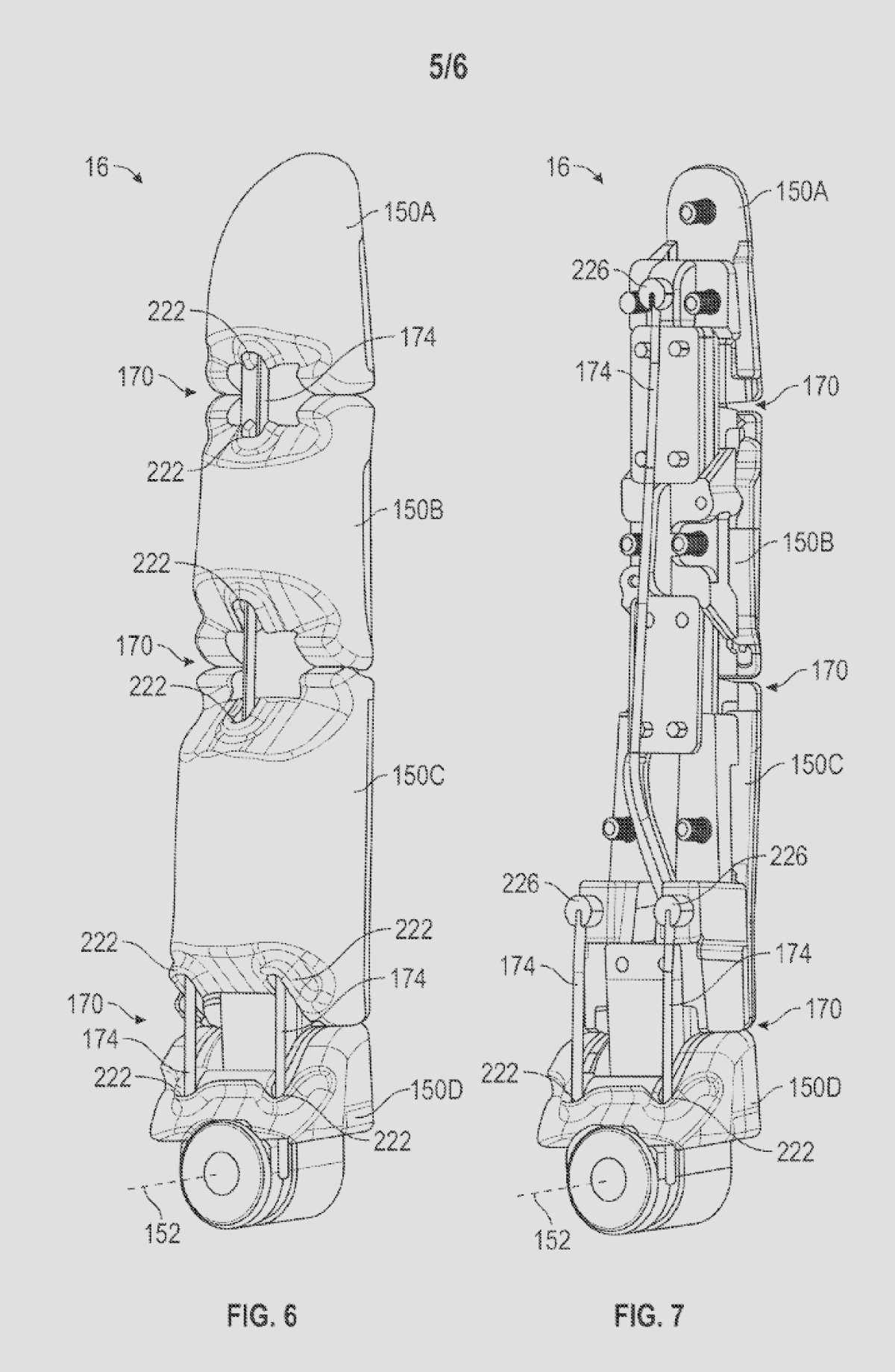
Beyond the complex wrist routing, the fingers themselves are designed for high durability and precise manipulation. Most fingers on the Optimus hand consist of four distinct structures: a distal member at the tip, two middle members, and a base member.
Instead of relying on simple pin hinges, which can wear out and generate excess friction, the finger structures feature curved contact surfaces that engage in smooth rolling contact as the finger bends.
To control these rolling joints, a standard finger utilizes three distinct cables. One primary cable is routed behind the base joint and in front of the upper joints to control the main grasping motion.
Not a Tesla App
The other two cables are attached specifically to the middle structures to control adduction and abduction, allowing the robot to spread its fingers side to side. To prevent these vital cables from crossing over each other and fraying, the internal finger members contain precision-machined channels that maintain lateral alignment all the way to their termination points.
Iterative Improvements
According to Elon Musk on 19 April 2026, this patented hand design has already been changed and iterated upon.
We already changed the design. This one didn’t actually work.
— Elon Musk (@elonmusk) April 19, 2026
According to Elon, this unique rolling finger joint didn’t work in practice. We’ll have to wait and see whether Tesla releases another hand-related patent or wait for the launch of Optimus V3 to see exactly what has changed.
The Knee: Extreme Mechanical Leverage
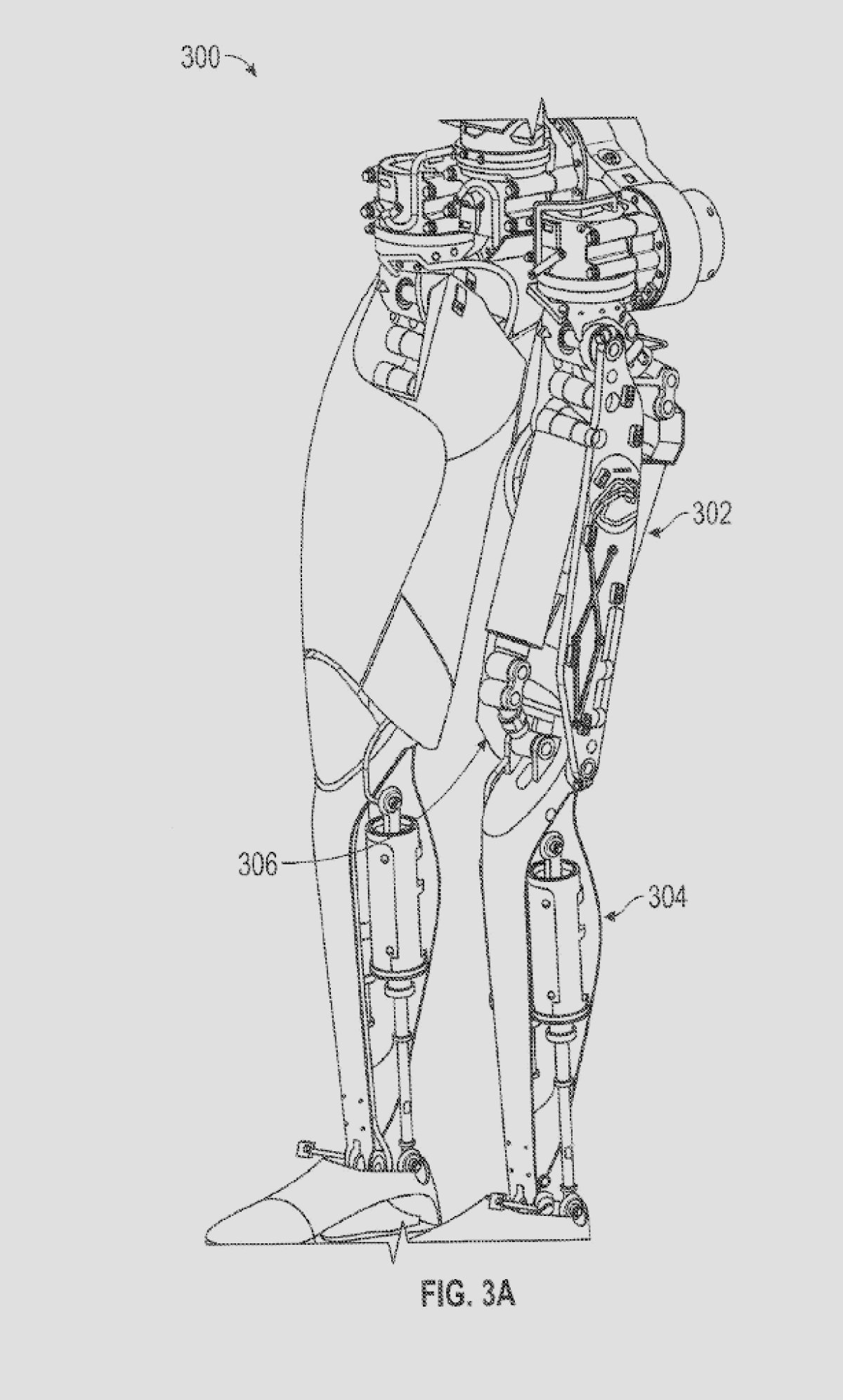
While the hand focuses on frictionless routing, the robotic knee patent authored by Rod Jafari is laser-focused on maximizing physical leverage and actuator efficiency. To ensure Optimus can walk, crouch, and lift heavy objects efficiently, the joint heavily borrows from the structural engineering of the human body.
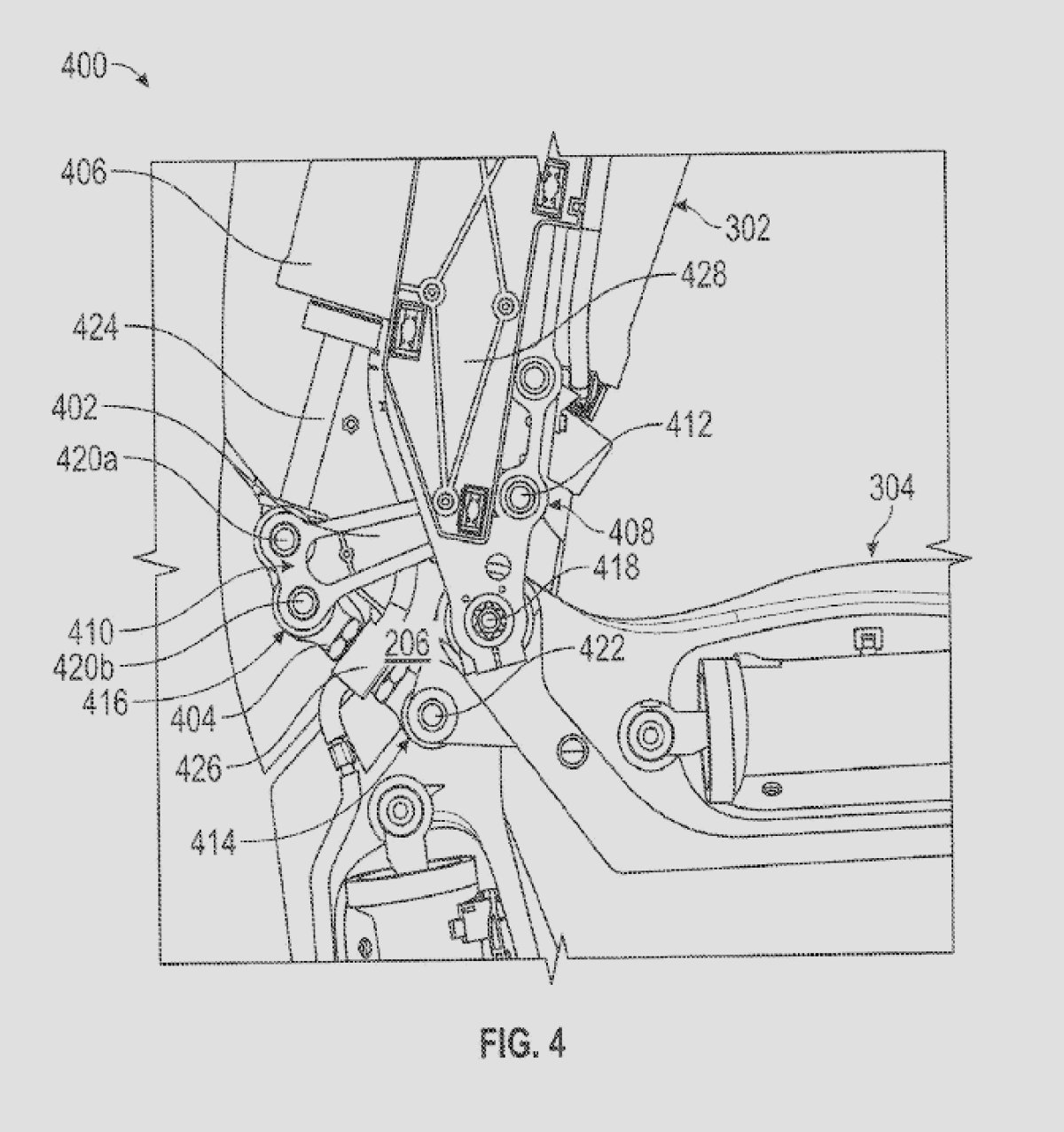
Instead of a standard mechanical hinge, the Tesla knee uses a four-node mechanical linkage. This design is a direct mechanical analog to the biological interactions between the human kneecap, femur, tibia, and cruciate ligaments.
Not a Tesla App
The primary advantage of using a four-bar linkage over a simple hinge is how it manages dynamic loads. When the robot bends down to pick up a heavy box, this specific geometry distributes the physical stress across multiple nodes, maintaining the structural integrity of the joint and preventing mechanical failure under heavy weight.
Furthermore, this biomimetic setup offers an extreme mechanical advantage to the robot’s hardware. The entire knee joint is driven by a single linear actuator, essentially a highly precise servo motor, located in the upper thigh. Because of the clever geometry of the linkage, the linear actuator only needs to rotate its primary link member by about 60 degrees. However, that relatively small 60-degree input translates into a massive 150-degree rotational range for the lower leg.
This massive movement multiplier is a crucial advantage for a battery-powered humanoid. Because the linear actuator only needs to move a tiny physical distance to generate a massive swing in the lower leg, the robot saves substantial amounts of electrical power while remaining highly compact.
Not a Tesla App
To keep this highly leveraged system safe, a force sensor is integrated directly into the secondary link member to measure the real-time physical load placed on the leg. The robot’s processing circuitry then uses this sensor data to calculate the exact micro-displacement required by the actuator, factoring in the leg’s current angle, the desired walking speed, and the required torque for the next step.
While Tesla was initially set to unveil Optimus in Q1, it will now do so closer to production to prevent competitors from copying any work they’ve done.